本記事よりも良い接続方法がわかったので以下の記事にまとめた。
xx-prime.hatenablog.com
BeagleV-Fireとは
一言でいうと、RISC -VのCPUとFPGA が載った素敵シングルボードコンピュータ 。未来しか感じない。
クイックスタートを見てみる
docs.beagle.cc
これまでのBeagleboneシリーズと同様に、PCとUSBで接続するだけでOKなように見える。が、実はそれはウソだ。
Windows にBeagleV-FireをUSBで接続してみるまず、十分な電力を供給できるUSBポートに、BeagleV-FIreを接続すると、Windows の設定→デバイス →その他のデバイス にBeagleV-Fireが現れる。
BeagleV-Fire はその他のデバイス に現れるが、ドライバーは使用できませんと表示される
しかし、「ドライバーは使用できません」と出ている。
BeagleV-Fireのサイトを探してみたが、これ用のUSBドライバは今のところ見つからない。
これまでのBeagleboneシリーズだと、USBドライバが当たるとネットワークデバイス がwindows 上に生成されるのが普通だったが、BeagleV-Fireはドライバがないためネットワークデバイス は生成されない。
ここで一旦あきらめて1ヶ月ほど放置した。
webサーチ
webサーチをしたところ、windows 上でvirtualbox 内にlinux ホストを動作させてBeagleV-Fireと通信できたという書き込みを見つけた。メモってなかったのでリンクは貼れない。無念。
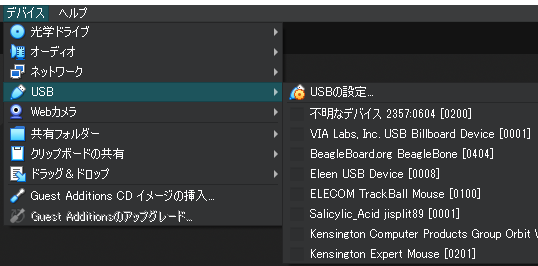
WindowsPCにBeagleV-Fireをつなぎ、その他のデバイス のBeagleV-Fireが出ている状態でVirtualbox のUbuntu を立ち上げ、USB接続の選択肢の中からBeagleboneを選ぶ。
Virtualbox に現れたUSB下のBeagleV-Fire
[0404]のがそれ。
USB接続を tail -f /var/log/syslog で見てみる
Virtualbox 内のLinux でsyslogをtailしながら上記のUSB接続を行った結果が以下。
2024-03-06 T22:26:20.043974+09:00 dirac kernel: [ 208 .789837 ] usb 2 -1 : new high-speed USB device number 2 using ehci-pci
2024-03-06 T22:26:20.543991+09:00 dirac kernel: [ 209 .291739 ] usb 2 -1 : New USB device found, idVendor=1d6b , idProduct=0104 , bcdDevice= 4 .04
2024-03-06 T22:26:20.544023+09:00 dirac kernel: [ 209 .291749 ] usb 2 -1 : New USB device strings: Mfr=1 , Product=2 , SerialNumber=3
2024-03-06 T22:26:20.544027+09:00 dirac kernel: [ 209 .291753 ] usb 2 -1 : Product: BeagleBone
2024-03-06 T22:26:20.544030+09:00 dirac kernel: [ 209 .291756 ] usb 2 -1 : Manufacturer: BeagleBoard.org
2024-03-06 T22:26:20.544032+09:00 dirac kernel: [ 209 .291762 ] usb 2 -1 : SerialNumber: 1234BBB K5678
2024-03-06 T22:26:20.590730+09:00 dirac mtp-probe: checking bus 2 , device 2 : "/sys/devices/pci0000:00 /0000 :00 :1f .5 /usb2/2 -1 "
2024-03-06 T22:26:20.592633+09:00 dirac mtp-probe: bus: 2 , device: 2 was not an MTP device
2024-03-06 T22:26:20.704368+09:00 dirac kernel: [ 209 .441959 ] cdc_acm 2 -1 :1 .2 : ttyACM0: USB ACM device
2024-03-06 T22:26:20.704396+09:00 dirac kernel: [ 209 .450089 ] usbcore: registered new interface driver cdc_acm
2024-03-06 T22:26:20.704400+09:00 dirac kernel: [ 209 .450098 ] cdc_acm: USB Abstract Control Model driver for USB modems and ISDN adapters
2024-03-06 T22:26:20.725160+09:00 dirac kernel: [ 209 .471220 ] usbcore: registered new interface driver cdc_ether
2024-03-06 T22:26:20.802902+09:00 dirac kernel: [ 209 .547430 ] cdc_ncm 2 -1 :1 .0 : MAC-Address: 00 :04 :a3:e5:99 :39
2024-03-06 T22:26:20.802924+09:00 dirac kernel: [ 209 .548189 ] cdc_ncm 2 -1 :1 .0 eth0: register 'cdc_ncm' at usb-0000 :00 :1f .5 -1 , CDC NCM (NO ZLP), 00 :04 :a3:e5:99 :39
2024-03-06 T22:26:20.802927+09:00 dirac kernel: [ 209 .551873 ] usbcore: registered new interface driver cdc_ncm
2024-03-06 T22:26:20.818423+09:00 dirac NetworkManager[ 564 ]: <info> [1709731580 .7993 ] manager: (eth0): new Ethernet device (/org/freedesktop/NetworkManager/Devices/3 )
2024-03-06 T22:26:20.828452+09:00 dirac kernel: [ 209 .574797 ] usbcore: registered new interface driver cdc_wdm
2024-03-06 T22:26:20.838001+09:00 dirac kernel: [ 209 .586804 ] usbcore: registered new interface driver cdc_mbim
2024-03-06 T22:26:20.861940+09:00 dirac mtp-probe: checking bus 2 , device 2 : "/sys/devices/pci0000:00 /0000 :00 :1f .5 /usb2/2 -1 "
2024-03-06 T22:26:20.863692+09:00 dirac mtp-probe: bus: 2 , device: 2 was not an MTP device
2024-03-06 T22:26:20.875373+09:00 dirac (udev-worker)[ 3931 ]: 2-1: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_cupsd /devices/pci0000:00/0000:00:1f.5/usb2/2-1 189:129' failed with exit code 1.
2024-03-06 T22:26:20.883280+09:00 dirac (udev-worker)[ 3931 ]: 2-1: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_ippeveprinter /devices/pci0000:00/0000:00:1f.5/usb2/2-1 189:129' failed with exit code 1.
2024-03-06 T22:26:20.904128+09:00 dirac (udev-worker)[ 3934 ]: 2-1:1.1: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_cupsd /devices/pci0000:00/0000:00:1f.5/usb2/2-1/2-1:1.1 0:0' failed with exit code 1.
2024-03-06 T22:26:20.916853+09:00 dirac kernel: [ 209 .664338 ] cdc_ncm 2 -1 :1 .0 enx0004a3e59939: renamed from eth0
2024-03-06 T22:26:20.933606+09:00 dirac (udev-worker)[ 3931 ]: 2-1:1.3: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_cupsd /devices/pci0000:00/0000:00:1f.5/usb2/2-1/2-1:1.3 0:0' failed with exit code 1.
2024-03-06 T22:26:20.935609+09:00 dirac (udev-worker)[ 3934 ]: 2-1:1.1: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_ippeveprinter /devices/pci0000:00/0000:00:1f.5/usb2/2-1/2-1:1.1 0:0' failed with exit code 1.
2024-03-06 T22:26:20.946584+09:00 dirac NetworkManager[ 564 ]: <info> [1709731580 .9461 ] device (eth0): interface index 3 renamed iface from 'eth0' to 'enx0004a3e59939'
2024-03-06 T22:26:20.965150+09:00 dirac snapd[ 530 ]: hotplug.go:200 : hotplug device add event ignored, enable experimental.hotplug
2024-03-06 T22:26:20.974193+09:00 dirac (udev-worker)[ 3931 ]: 2-1:1.3: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_ippeveprinter /devices/pci0000:00/0000:00:1f.5/usb2/2-1/2-1:1.3 0:0' failed with exit code 1.
2024-03-06 T22:26:20.997747+09:00 dirac (udev-worker)[ 3933 ]: 2-1:1.2: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_cupsd /devices/pci0000:00/0000:00:1f.5/usb2/2-1/2-1:1.2 0:0' failed with exit code 1.
2024-03-06 T22:26:21.036539+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .0118 ] device (enx0004a3e59939): state change: unmanaged -> unavailable (reason 'managed', sys-iface-state: 'external')
2024-03-06 T22:26:21.036755+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .0204 ] settings: (enx0004a3e59939): created default wired connection '有線接続 1 '
2024-03-06 T22:26:21.058522+09:00 dirac (udev-worker)[ 3933 ]: 2-1:1.2: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_ippeveprinter /devices/pci0000:00/0000:00:1f.5/usb2/2-1/2-1:1.2 0:0' failed with exit code 1.
2024-03-06 T22:26:21.088057+09:00 dirac (udev-worker)[ 3931 ]: 2-1:1.0: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_cupsd /devices/pci0000:00/0000:00:1f.5/usb2/2-1/2-1:1.0 0:0' failed with exit code 1.
2024-03-06 T22:26:21.094902+09:00 dirac (udev-worker)[ 3931 ]: 2-1:1.0: Process '/usr/lib/snapd/snap-device-helper bind snap_cups_ippeveprinter /devices/pci0000:00/0000:00:1f.5/usb2/2-1/2-1:1.0 0:0' failed with exit code 1.
2024-03-06 T22:26:21.182449+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .1790 ] device (enx0004a3e59939): carrier: link connected
2024-03-06 T22:26:21.186478+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .1850 ] device (enx0004a3e59939): state change: unavailable -> disconnected (reason 'carrier-changed', sys-iface-state: 'managed')
2024-03-06 T22:26:21.219134+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .2048 ] policy: auto-activating connection '有線接続 1 ' (134244d1 -ebd4-3a8a -b6ee-b7e7b8c02e44)
2024-03-06 T22:26:21.222714+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .2225 ] device (enx0004a3e59939): Activation: starting connection '有線接続 1 ' (134244d1 -ebd4-3a8a -b6ee-b7e7b8c02e44)
2024-03-06 T22:26:21.224111+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .2237 ] device (enx0004a3e59939): state change: disconnected -> prepare (reason 'none', sys-iface-state: 'managed')
2024-03-06 T22:26:21.229626+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .2294 ] device (enx0004a3e59939): state change: prepare -> config (reason 'none', sys-iface-state: 'managed')
2024-03-06 T22:26:21.239209+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .2390 ] device (enx0004a3e59939): state change: config -> ip-config (reason 'none', sys-iface-state: 'managed')
2024-03-06 T22:26:21.252312+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .2521 ] dhcp4 (enx0004a3e59939): activation: beginning transaction (timeout in 45 seconds)
2024-03-06 T22:26:21.301247+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .3011 ] dhcp4 (enx0004a3e59939): state changed new lease, address=192 .168 .7 .1
2024-03-06 T22:26:21.303763+09:00 dirac avahi-daemon[ 511 ]: Joining mDNS multicast group on interface enx0004a3e59939.IPv4 with address 192 .168 .7 .1 .
2024-03-06 T22:26:21.306995+09:00 dirac avahi-daemon[ 511 ]: New relevant interface enx0004a3e59939.IPv4 for mDNS.
2024-03-06 T22:26:21.307190+09:00 dirac avahi-daemon[ 511 ]: Registering new address record for 192 .168 .7 .1 on enx0004a3e59939.IPv4.
2024-03-06 T22:26:21.312555+09:00 dirac avahi-daemon[ 511 ]: Joining mDNS multicast group on interface enx0004a3e59939.IPv6 with address fe80::1683 :8e58 :dec3:f0c4.
2024-03-06 T22:26:21.312749+09:00 dirac avahi-daemon[ 511 ]: New relevant interface enx0004a3e59939.IPv6 for mDNS.
2024-03-06 T22:26:21.312860+09:00 dirac avahi-daemon[ 511 ]: Registering new address record for fe80::1683 :8e58 :dec3:f0c4 on enx0004a3e59939.*.
2024-03-06 T22:26:21.403252+09:00 dirac dbus-daemon[ 512 ]: [system] Activating via systemd: service name='org.freedesktop.nm_dispatcher' unit='dbus-org.freedesktop.nm-dispatcher.service' requested by ':1 .10 ' (uid=0 pid=564 comm="/usr/sbin/NetworkManager --no-daemon" label="unconfined")
2024-03-06 T22:26:21.403448+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .3962 ] device (enx0004a3e59939): state change: ip-config -> ip-check (reason 'none', sys-iface-state: 'managed')
2024-03-06 T22:26:21.404002+09:00 dirac systemd[ 1 ]: Starting NetworkManager-dispatcher.service - Network Manager Script Dispatcher Service...
2024-03-06 T22:26:21.546342+09:00 dirac dbus-daemon[ 512 ]: [system] Successfully activated service 'org.freedesktop.nm_dispatcher'
2024-03-06 T22:26:21.546732+09:00 dirac systemd[ 1 ]: Started NetworkManager-dispatcher.service - Network Manager Script Dispatcher Service.
2024-03-06 T22:26:21.568892+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .5664 ] device (enx0004a3e59939): state change: ip-check -> secondaries (reason 'none', sys-iface-state: 'managed')
2024-03-06 T22:26:21.581231+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .5667 ] device (enx0004a3e59939): state change: secondaries -> activated (reason 'none', sys-iface-state: 'managed')
2024-03-06 T22:26:21.581386+09:00 dirac NetworkManager[ 564 ]: <info> [1709731581 .5676 ] device (enx0004a3e59939): Activation: successful, device activated.
2024-03-06 T22:26:31.973542+09:00 dirac systemd[ 1 ]: NetworkManager-dispatcher.service: Deactivated successfully.
ちょっとこのコードブロックの貼り付けかたには改善が必要だ。
なんかよくわからんがUSB接続のネットワークデバイス が生成されたように見える。
$ ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1 /8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: enp0s3: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
link/ether 08:00:27:79:aa:df brd ff:ff:ff:ff:ff:ff
inet 172.17.29.58 /24 brd 172.17.29.255 scope global dynamic noprefixroute enp0s3
valid_lft 6753sec preferred_lft 6753sec
inet6 fe80::a00:27ff:fe79:aadf/64 scope link
valid_lft forever preferred_lft forever
3: enx0004a3e59939: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
link/ether 00:04:a3:e5:99:39 brd ff:ff:ff:ff:ff:ff
inet 192.168.7.1 /24 brd 192.168.7.255 scope global dynamic noprefixroute enx0004a3e59939
valid_lft 949sec preferred_lft 949sec
inet6 fe80::1683:8e58:dec3:f0c4/64 scope link noprefixroute
valid_lft forever preferred_lft forever
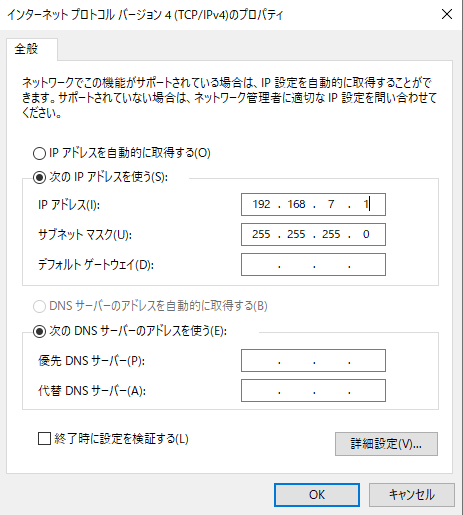
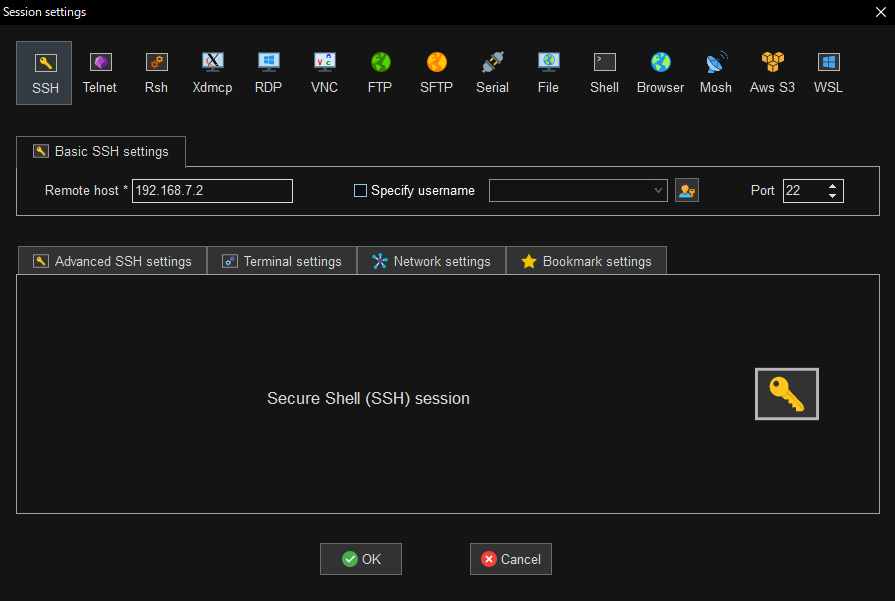
無事に192.168.7.1のネットワークデバイス が生成された。これでBeagleV-Fireの192.168.7.2にssh でログインできる。
$ ssh 192 .168 .7 .2 -l beagle
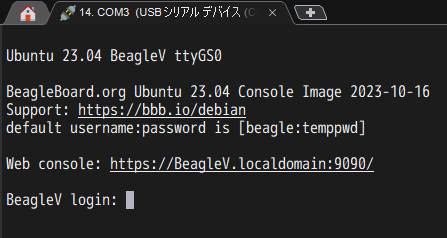
Ubuntu 23 .04
BeagleBoard.org Ubuntu 23 .04 Console Image 2023-10-16
Support: https://bbb.io/debian
default username:password is [ beagle:temppwd]
beagle@192 .168 .7 .2 ' s password:
Last login: Thu Oct 26 02:58:41 2023 from 192.168.7.1
beagle@BeagleV:~$
ようやく入れた!見ての通り、ユーザ名はbeagleでパスワードはtemppwdである。Ubuntu Linux 23.04が動いとる。RISC -Vで普通にUbuntu が動くなんて素敵すぎる。
BeagleV-Fireのネットワークデバイス を見てみる
beagle@BeagleV:~$ ip a
1: lo: < LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127 .0 .0 .1 /8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: eth0: < NO-CARRIER,BROADCAST,MULTICAST,UP> mtu 1500 qdisc mq state DOWN group default qlen 1000
link/ether 00:04:a3:e5:99:37 brd ff:ff:ff:ff:ff:ff
3: eth1: < BROADCAST,MULTICAST> mtu 1500 qdisc noop state DOWN group default qlen 1000
link/ether 00:04:a3:e5:99:36 brd ff:ff:ff:ff:ff:ff
altname end0
4: ip6tnl0@NONE: < NOARP> mtu 1452 qdisc noop state DOWN group default qlen 1000
link/tunnel6 :: brd :: permaddr 6ed6:9f50:72e2::
5: usb0: < BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 00:04:a3:e5:99:3a brd ff:ff:ff:ff:ff:ff
inet 192 .168 .7 .2 /24 brd 192 .168 .7 .255 scope global usb0
valid_lft forever preferred_lft forever
inet6 fe80::204:a3ff:fee5:993a/64 scope link
valid_lft forever preferred_lft forever
6: docker0: < NO-CARRIER,BROADCAST,MULTICAST,UP> mtu 1500 qdisc noqueue state DOWN group default
link/ether 02:42:1e:54:73:cc brd ff:ff:ff:ff:ff:ff
inet 172 .17 .0 .1 /16 brd 172 .17 .255 .255 scope global docker0
valid_lft forever preferred_lft forever
なんじゃこりゃー。なんかdockerが蠢いてるようだ。usb0が、今回のssh 通信で使われているネットワークデバイス である。
しかし購入してからログインするまで1ヶ月かかるとはさすが俺としか言いようがない。
あのsyslogを丹念に見れば、windows に当てるべきusb driverがわかるかもしれない。
夜も更けてきたのでここまでにしよう。
本記事よりも良い接続方法がわかったので以下の記事にまとめた。
xx-prime.hatenablog.com